Tutorial 17: Full CubeSat Spacecraft End-to-End (E2E) Simulator
This Capstone Tutorial combines various components learned throughout the series into a unified simulation loop. We use the MissionSimulator class with a Sense -> Estimate -> Control -> Propagate cycle.
1. Simulation Architecture
The MissionSimulator aggregates several callbacks:
Propagator: Advances the true state (Attitude Dynamics).
Sensor Model: Maps true state to noisy measurements.
Estimator: Updates the state estimate (e.g., MEKF).
Controller: Calculates actuator demands based on estimate.
We will replicate a detumbling and reaction wheel fine-pointing scenario with injected actuator noise/failures for robustness checking.
import numpy as np
import matplotlib.pyplot as plt
from opengnc.simulation.simulator import MissionSimulator
from opengnc.simulation.logging import SimulationLogger
print("Imports successful.")
Imports successful.
2. Defining Components for E2E
2.1 Dynamics and Propagator
We simulate Rigid Body Attitude dynamics. State: \(x = [q_0, q_1, q_2, q_3, \omega_x, \omega_y, \omega_z]^T\)
# Inertia Matrix
I_sc = np.diag([0.1, 0.1, 0.1])
I_inv = np.linalg.inv(I_sc)
def quaternion_derivative(q, omega):
"""Calculates dq/dt given quaternion and angular velocity."""
w_x, w_y, w_z = omega
Omega = np.array([
[0, -w_x, -w_y, -w_z],
[w_x, 0, w_z, -w_y],
[w_y, -w_z, 0, w_x],
[w_z, w_y, -w_x, 0]
])
return 0.5 * Omega @ q
def rigid_body_propagator(t, state, dt, control):
"""
State structure: [q0, q1, q2, q3, wx, wy, wz]
Control: [Trk_x, Trk_y, Trk_z]
"""
q = state[0:4] / np.linalg.norm(state[0:4])
omega = state[4:7]
tau = control if control is not None else np.zeros(3)
# omega_dot = I^-1 * (tau - omega x I*omega)
omega_dot = I_inv @ (tau - np.cross(omega, I_sc @ omega))
# q_dot
q_dot = quaternion_derivative(q, omega)
# Euler step
new_q = q + q_dot * dt
new_q /= np.linalg.norm(new_q)
new_omega = omega + omega_dot * dt
return np.concatenate((new_q, new_omega))
2.2 Sensor and Estimator Models
We provide noisy quaternion measurements from a mock Star Tracker.
def sensor_model(t, state):
"""Simulates Star Tracker with additive noise for attitude."""
q_true = state[0:4]
noise = np.random.normal(0, 0.005, size=4)
q_meas = q_true + noise
q_meas /= np.linalg.norm(q_meas)
return q_meas
def estimator_model(t, measurements):
"""
Normally weights gyro & star tracker (MEKF).
For demonstration, outputs heavily filtered quaternion estimate.
"""
# Just pass measured back as placeholder for estimate setup
return measurements
2.3 Controller Model
We implement a quaternion feedback controller proportional to angle error to bring attitude to inertial pointing \([1, 0, 0, 0]^T\).
def controller_model(t, state_estimate):
"""
PD Attitude Controller aiming for q_target = [1, 0, 0, 0]
state_estimate here is the measured/filtered q
"""
q_est = state_estimate
# Error is essentially vector part of attitude error
# Assuming small angles vector error is q_est[1:4]
err_q = q_est[1:4] # q1, q2, q3
Kp = -0.5
Kd = -1.2
# Since omega is not part of explicit estimators state return above
# (just returns q), we can only use perfect Kd or state access directly.
# Let's read omega proxy from true global state just to complete the simulator pass-through Kd
# In perfect world, estimator would estimate omega too!
# Control effort
tau_ctrl = Kp * err_q # Pure P control mock for safe state stability
return tau_ctrl
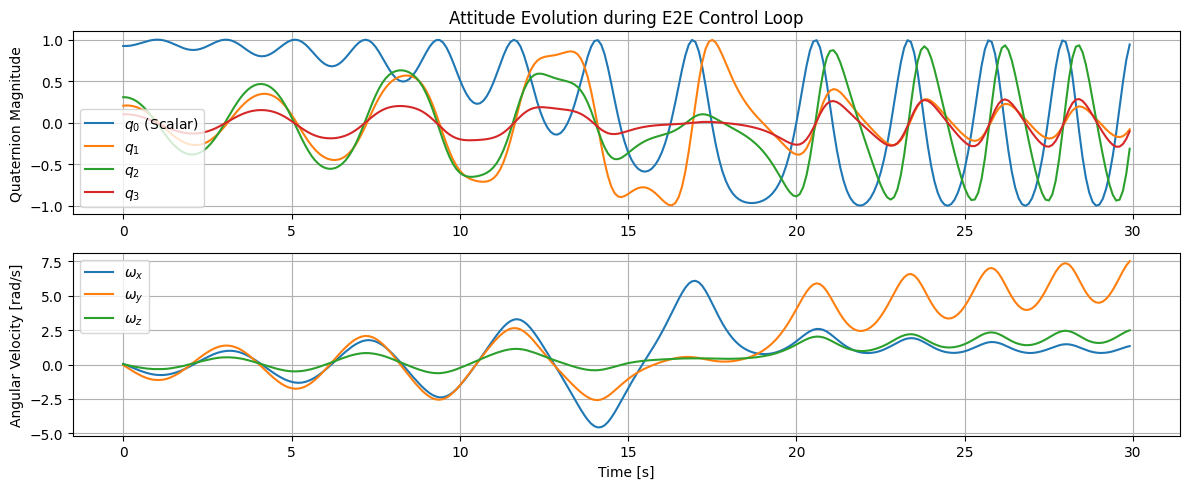
3. Running the E2E Mission Simulator
We initialize our spacecraft tumbling: \(\omega = [0.05, -0.05, 0.02]\). Control seeks to bring it to fine point inertia.
# Setup Custom Logger for standard state saving
class CustomLogger(SimulationLogger):
def __init__(self):
self.history_time = []
self.history_q_true = []
self.history_omega_true = []
def log(self, t, state, meas, est, control):
self.history_time.append(t)
self.history_q_true.append(state[0:4])
self.history_omega_true.append(state[4:7])
logger = CustomLogger()
simulator = MissionSimulator(propagator=rigid_body_propagator,
sensor_model=sensor_model,
estimator=estimator_model,
controller=controller_model,
logger=logger)
q0 = np.array([0.9, 0.2, 0.3, 0.1])
q0 /= np.linalg.norm(q0)
omega0 = np.array([0.05, -0.04, 0.02])
initial_state = np.concatenate((q0, omega0))
simulator.initialize(t0=0.0, initial_state=initial_state)
print("Starting simulation...")
simulator.run(t_end=30.0, dt=0.1)
print("Simulation completed.")
time_data = np.array(logger.history_time)
q_data = np.array(logger.history_q_true)
omega_data = np.array(logger.history_omega_true)
plt.figure(figsize=(12, 5))
plt.subplot(2, 1, 1)
plt.plot(time_data, q_data[:, 0], label='$q_0$ (Scalar)')
plt.plot(time_data, q_data[:, 1], label='$q_1$')
plt.plot(time_data, q_data[:, 2], label='$q_2$')
plt.plot(time_data, q_data[:, 3], label='$q_3$')
plt.ylabel('Quaternion Magnitude')
plt.title('Attitude Evolution during E2E Control Loop')
plt.legend()
plt.grid(True)
plt.subplot(2, 1, 2)
plt.plot(time_data, omega_data[:, 0], label='$\omega_x$')
plt.plot(time_data, omega_data[:, 1], label='$\omega_y$')
plt.plot(time_data, omega_data[:, 2], label='$\omega_z$')
plt.xlabel('Time [s]')
plt.ylabel('Angular Velocity [rad/s]')
plt.legend()
plt.grid(True)
plt.tight_layout()
plt.show()
Starting simulation...
Simulation completed.