Tutorial 14: Indirect & Direct Collocation Optimal Control
This tutorial covers Continuous Thrust Guidance using Indirect Methods (Pontryagin’s Minimum Principle) and Direct Methods (Direct Collocation) to solve low-thrust trajectory optimization problems.
1. Theory Prerequisite
1.1 Indirect Method (PMP)
Formulates the problem by augmenting the state \(x\) with costates \(\lambda\) and forming the Hamiltonian \(H\). Necessary conditions for optimality require solving a Boundary Value Problem (BVP):
1.2 Direct Collocation
Discretizes the trajectory into a series of \(N\) nodes. States and controls at nodes are treated as optimization variables. Linear/Quad constraints enforce that the dynamics update rule holds (e.g., Trapezoidal rule).
Objective: Minimize total control effort \(\int ||u(t)||^2 dt \approx \sum ||u_i||^2\)
Constraints: \(\dot{x} = f(x, u)\) enforced via algebraic transcription formulation.
import numpy as np
import matplotlib.pyplot as plt
from opengnc.guidance.continuous_thrust import indirect_optimal_guidance, direct_collocation_guidance
print("Imports successful.")
Imports successful.
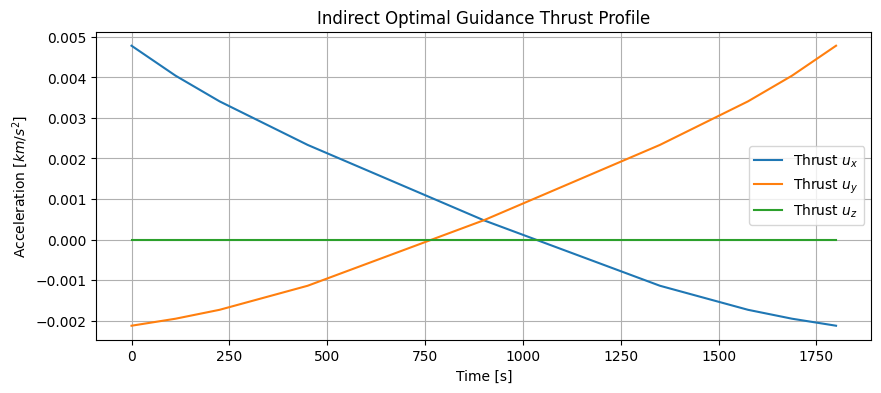
2. Demonstration: Indirect Optimal Guidance (BVP)
We solve for a continuous thrust maneuver from position \(r_0\) to \(r_f\) with specified velocities in a given time.
mu = 398600.4418
r0 = np.array([7000.0, 0.0, 0.0])
v0 = np.array([0.0, 7.5, 0.0])
rf = np.array([0.0, 7000.0, 0.0])
vf = np.array([-7.5, 0.0, 0.0])
tf = 1800.0 # 30 minutes transfer time
print("Solving BVP (Indirect Method)... This might take a few seconds.")
t_array, acc_profile = indirect_optimal_guidance(r0, v0, rf, vf, tf, mu)
if t_array is not None:
print("Optimal Solution Found!")
plt.figure(figsize=(10, 4))
plt.plot(t_array, acc_profile[0, :], label='Thrust $u_x$')
plt.plot(t_array, acc_profile[1, :], label='Thrust $u_y$')
plt.plot(t_array, acc_profile[2, :], label='Thrust $u_z$')
plt.xlabel('Time [s]')
plt.ylabel('Acceleration [$km/s^2$]')
plt.title('Indirect Optimal Guidance Thrust Profile')
plt.legend()
plt.grid(True)
plt.show()
else:
print("Solver did not converge. Sensitivity to initial guess high (standard BVP issue).")
Solving BVP (Indirect Method)... This might take a few seconds.
Optimal Solution Found!
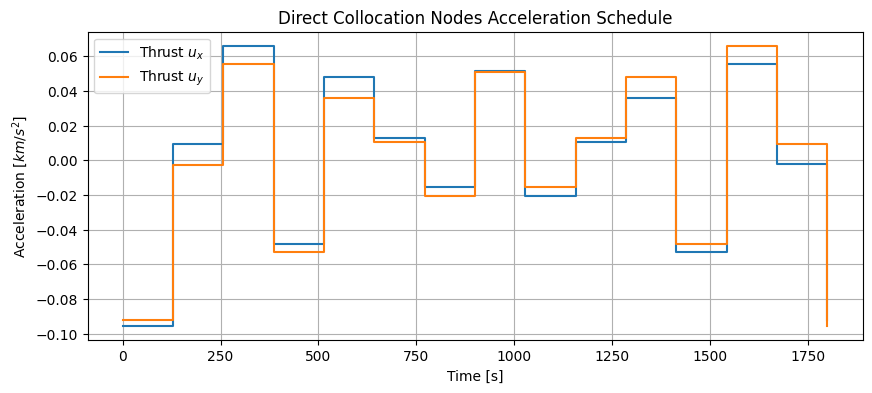
3. Demonstration: Direct Collocation Guidance
Direct methods aggregate state trajectories into large sparse formulations.
print("Solving Direct Collocation NLP...")
sol = direct_collocation_guidance(r0, v0, rf, vf, tf, mu, n_nodes=15)
if sol is not None:
print("Direct Collocation Solved!")
# sol shape: (n_nodes, 9) where state layout is [rx, ry, rz, vx, vy, vz, ax, ay, az]
accs = sol[:, 6:9]
time_colloc = np.linspace(0, tf, 15)
plt.figure(figsize=(10, 4))
plt.step(time_colloc, accs[:, 0], where='post', label='Thrust $u_x$')
plt.step(time_colloc, accs[:, 1], where='post', label='Thrust $u_y$')
plt.xlabel('Time [s]')
plt.ylabel('Acceleration [$km/s^2$]')
plt.title('Direct Collocation Nodes Acceleration Schedule')
plt.legend()
plt.grid(True)
plt.show()
else:
print("Direct Collocation Solver failed to find feasible point.")
Solving Direct Collocation NLP...
Direct Collocation Solved!