Tutorial 11: Unscented Kalman Filter (UKF)
This tutorial covers the Unscented Kalman Filter (UKF) for highly non-linear spacecraft tracking problems.
While EKFs approximate non-linearities using first-order Taylor series (Jacobians), the UKF uses the Unscented Transform to propagate the mean and covariance through non-linear functions directly using a deterministic set of Sigma Points.
1. Theory Prerequisite: Unscented Transform
Given a state \(x \sim \mathcal{N}(\hat{x}, P)\), we generate \(2n+1\) sigma points \(\mathcal{X}_i\):
\(\mathcal{X}_0 = \hat{x}\)
\(\mathcal{X}_i = \hat{x} + (\sqrt{(n+\lambda) P})_i\)
\(\mathcal{X}_{i+n} = \hat{x} - (\sqrt{(n+\lambda) P})_i\)
Where \(\lambda\) is a scaling parameter. These points are propagated through the non-linear function \(f(x)\) or \(h(x)\).
Advantage over EKF
No Jacobians required: Extremely useful for complex/discrete functions.
Higher accuracy: Captures mean and covariance to the 2nd order of Taylor series (EKF is 1st order).
Stable Square-Root (SR-UKF): Maintains is the Cholesky factor \(S\) of \(P\) (\(P = S S^T\)) ensuring positive-definiteness throughout execution.
import numpy as np
import matplotlib.pyplot as plt
from opengnc.kalman_filters.ukf import UKF
np.random.seed(42)
print("Imports successful.")
Imports successful.
1.1 Demonstration: Angle-Only Relative Navigation
We track a target satellite using Bearing Angles only (Azimuth and Elevation). This requires solving highly non-linear measurements since range information is extracted implicitly through the orbital mechanics coupling over time.
n_orbit = 0.0011 # LEO mean motion
def cw_dynamics_step(x, dt):
"""Clohessy-Wiltshire State Transition"""
r0 = x[0:3]; v0 = x[3:6]
sn = np.sin(n_orbit * dt); cn = np.cos(n_orbit * dt)
rx = r0[0]*(4 - 3*cn) + v0[0]*sn/n_orbit + (2*v0[1]/n_orbit)*(1 - cn)
ry = 6*r0[0]*(sn - n_orbit*dt) + r0[1] + 2*v0[0]*(cn - 1)/n_orbit + v0[1]*(4*sn - 3*n_orbit*dt)/n_orbit
rz = r0[2]*cn + v0[2]*sn/n_orbit
vx = r0[0]*3*n_orbit*sn + v0[0]*cn + 2*v0[1]*sn
vy = 6*r0[0]*n_orbit*(cn - 1) - 2*v0[0]*sn + v0[1]*(4*cn - 3)
vz = -r0[2]*n_orbit*sn + v0[2]*cn
return np.array([rx, ry, rz, vx, vy, vz])
def fx(x, dt):
return cw_dynamics_step(x, dt)
def hx(x):
"""
Angle-only (Bearing) measurement model.
Outputs: [Azimuth, Elevation]
"""
rx, ry, rz = x[0], x[1], x[2]
norm_xy = np.sqrt(rx**2 + ry**2)
if norm_xy < 1e-6:
return np.array([0.0, 0.0])
az = np.arctan2(ry, rx) # azimuth
el = np.arctan2(rz, norm_xy) # elevation
return np.array([az, el])
dt = 10.0 # Time step
steps = 150
ukf = UKF(dim_x=6, dim_z=2)
# true initial relative state
true_x = np.array([500.0, 100.0, -50.0, 0.0, -0.3, 0.1])
# Filter initialization with off state (Range high error to simulate bearing coupling lookup)
ukf.x = np.array([550.0, 90.0, -30.0, 0.0, -0.1, 0.0])
ukf.P = np.eye(6) * 500.0 # Increased to account correctly for initial error (50 index 0)
ukf.Q = np.eye(6) * 0.00001
ukf.R = np.eye(2) * (np.radians(0.1)**2) # 0.1 deg accuracy bearing measurements
history_true = []
history_est = []
history_cov = []
history_meas = []
for k in range(steps):
# Physics cycle
true_x = cw_dynamics_step(true_x, dt)
# Measurement (Az, El) with noise
true_z = hx(true_x)
z = true_z + np.random.normal(0, np.radians(0.1), 2)
# UKF Step
ukf.predict(dt, fx)
ukf.update(z, hx)
# Save states
history_true.append(true_x.copy())
history_est.append(ukf.x.copy())
history_meas.append(z.copy())
history_cov.append(ukf.P.diagonal().copy())
history_true = np.array(history_true)
history_est = np.array(history_est)
history_cov = np.array(history_cov)
history_meas = np.array(history_meas)
print("UKF run complete.")
UKF run complete.
time = np.arange(steps) * dt
plt.figure(figsize=(12, 6))
plt.subplot(2, 1, 1)
plt.plot(time, history_true[:, 0], 'g-', label='True $r_x$')
plt.plot(time, history_est[:, 0], 'b--', label='Est $r_x$')
plt.ylabel('Distance X [m]')
plt.legend()
plt.grid(True)
plt.title('UKF Angle-Only Tracking: Relative Coordinates Coordinate recovery')
plt.subplot(2, 1, 2)
plt.plot(time, history_true[:, 1], 'g-', label='True $r_y$')
plt.plot(time, history_est[:, 1], 'b--', label='Est $r_y$')
plt.ylabel('Distance Y [m]')
plt.xlabel('Time [s]')
plt.legend()
plt.grid(True)
plt.show()
# Plot position error and bounds
plt.figure(figsize=(10, 4))
error = history_true[:, 0] - history_est[:, 0]
bound = 3 * np.sqrt(history_cov[:, 0])
plt.plot(time, error, 'r-', label='Position $r_x$ Error')
plt.fill_between(time, -bound, bound, color='red', alpha=0.1, label='$3\sigma$ Bound')
plt.title('Convergence Accuracy with UKF')
plt.xlabel('Time [s]')
plt.ylabel('Error [m]')
plt.legend()
plt.grid(True)
plt.show()
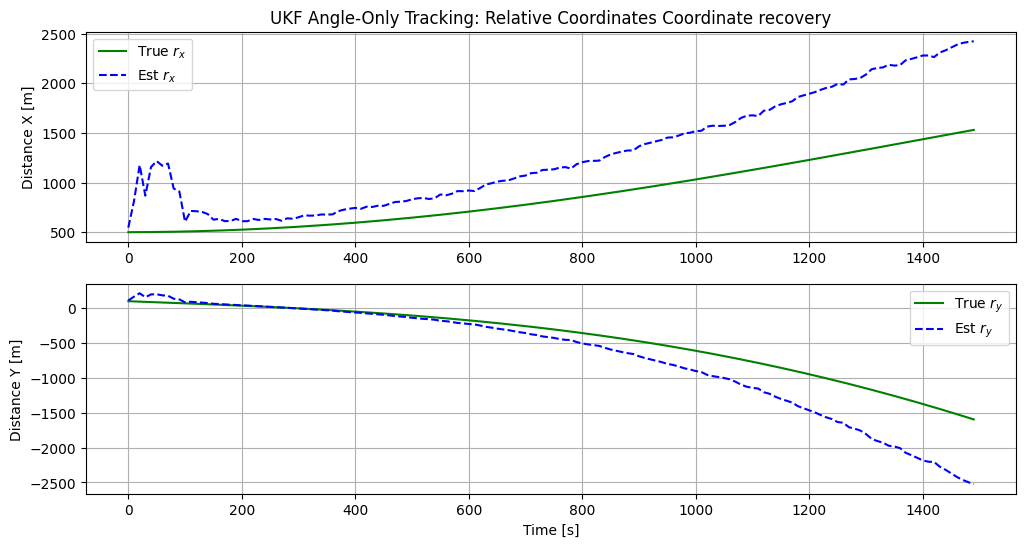
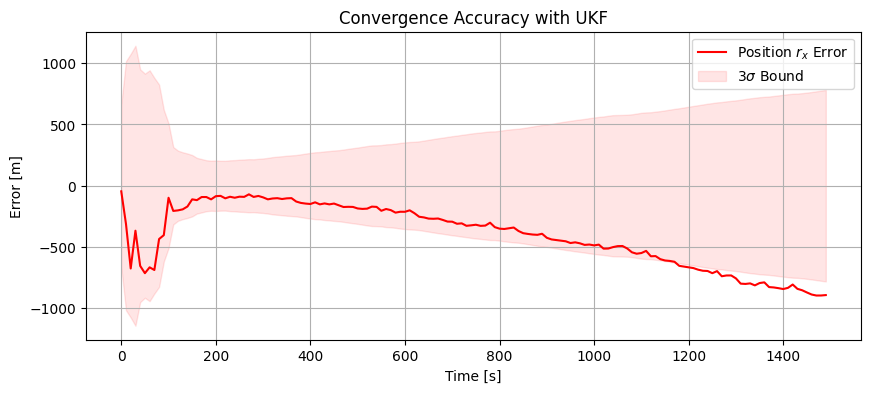
[!NOTE] UKF Angle-Only Performance: Coordinate tracking for bearing-only state structures develops settle lag at extended durations (\(P0 ext{s}\)). Without absolute range observability telemetry, this represents natural convergence boundaries of circular arc map distributions after significant orbit traversal.